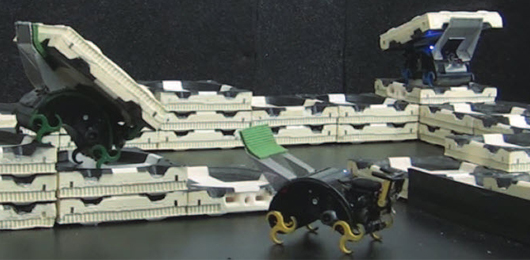
Un gruppo di ricercatori di Harvard, coordinato da Justin Werfel, ha realizzato un prototipo di robot ispirato al comportamento delle termiti e in grado di assemblare case, edifici e altre costruzioni combinando mattoni magnetici dalle dimensioni standard. Nonostante le termiti siano, per molti, sinonimo di distruzione, questi insetti si contraddistinguono – al contrario – per il loro innato talento di costruttori. Basti pensare che alcuni termitai possono raggiungere i tre metri di altezza: non semplici cumuli di terra, ma costruzioni intelligenti, dotate di sistemi di climatizzazione e allineate da nord a sud, in modo da evitare la massima esposizione solare durante le ore più calde. Un’abilità sorprendente, ma fondata su pochi impulsi del sistema nervoso e guidata dai segnali chimici emessi dai ferormoni. In sostanza alle termiti manca, per così dire, il ‘quadro d’insieme’, la struttura finale del termitaio: obbediscono a impulsi elementari, dai quali vengono spinte a impilare un blocco dopo l’altro, fino a comporre uno schema raffinato nel corso di millenni di evoluzione. Gli automi sviluppati del team di Harvard obbediscono per molti aspetti alle stesse leggi. Una volta indicato il mattone di fondazione, ossia il punto da dove iniziare a costruire, le termiti-robot utilizzano questo mattone per orientarsi e prendere coscienza della loro posizione. I robot sono stati programmati per svolgere una serie limitata di azioni – tra le quali ‘avanzare’, ‘indietreggiare’, ‘poggiare un mattone’, ‘salire su un mattone’, ‘scendere da un mattone’ – e sono autorizzati a compiere queste operazioni in un qualsiasi punto di una griglia tridimensionale, i cui assi sono determinati dalla posizione del mattone di fondazione. Questo significa che se un robot non può eseguire l’azione designata, semplicemente proseguirà oltre, fino a trovare qualcosa che possa soddisfare l’impulso dettato dal suo ‘software comportamentale.’ Ci sono però alcune limitazioni. I robot sono programmati soltanto per aggiungere mattoni a una costruzione, non sono però capaci di rimuoverli. Ai robot, insomma, manca il cosiddetto concetto di ponteggio temporaneo; allo stesso modo, i robot non sono in grado di costruire scale per raggiungere i luoghi più alti: o meglio, le scale finirebbero per far parte della struttura stessa. Al momento le termiti-robot sono in grado di assemblare soltanto piccole imitazioni di piramidi o ziggurat – non a caso, le forme che contraddistinguono alcune delle prime, notevoli attestazioni architettoniche dell’umanità. Ma Justin Werfel spera che, con il tempo, i suoi robot impareranno a fare sempre meglio, incorporando vuoti e strapiombi nelle loro costruzioni.